Objective
As the mentor for this project, I guided the team in developing a solution focused on addressing the challenges of obstacle mapping in robotic networks.Technology Stack
- ESP8266
- Compressive Sensing
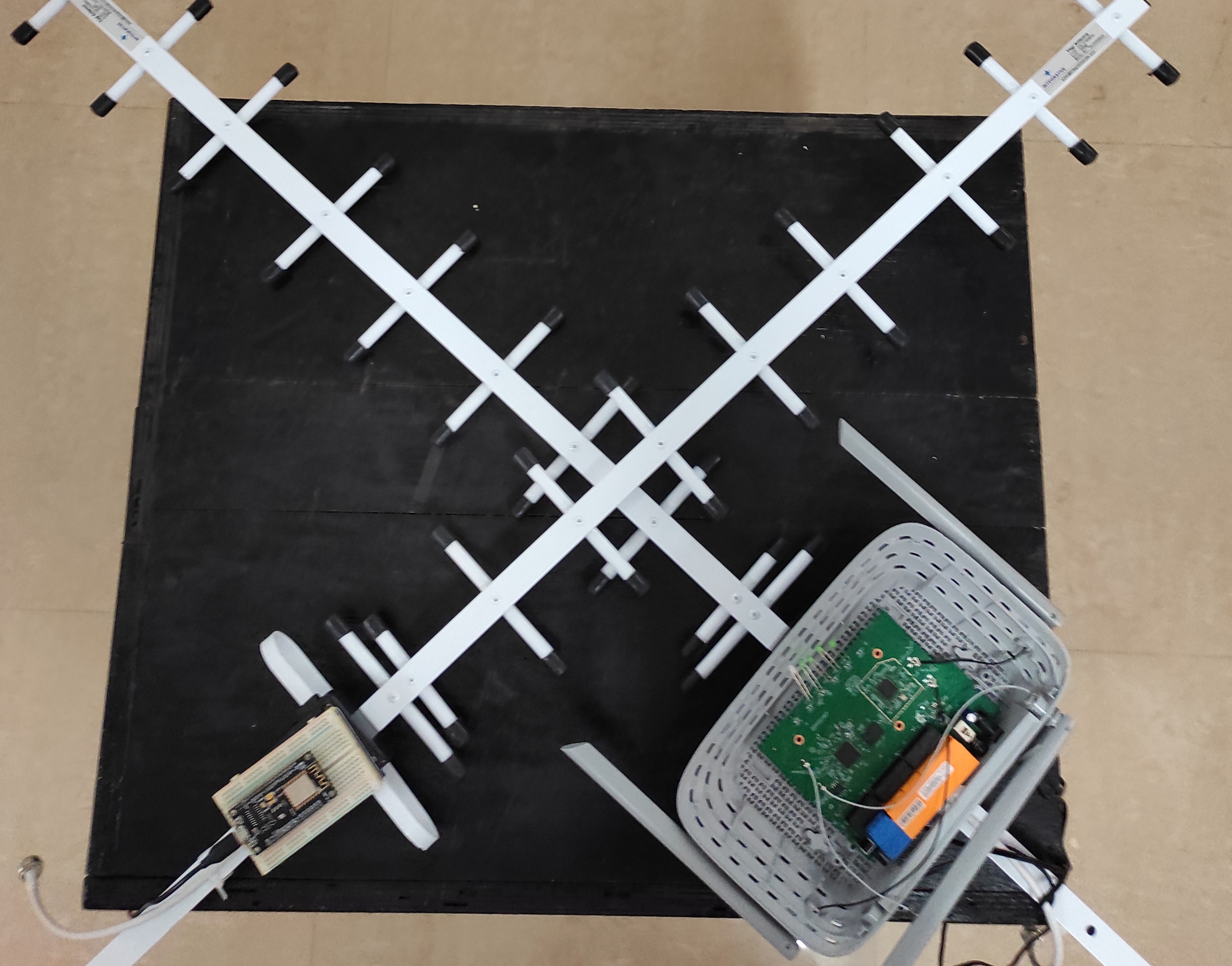
- Yagi Antenna
- Robotic Cooperative Network
Key Features
Obstacle mapping is essential for the robust operation of robotic networks, yet existing approaches struggle with mapping occluded objects. Our project, LEWI (Localization and mapping of Enclosed space using Wi-Fi signals), leverages the unique properties of Wi-Fi signals to map objects that are traditionally challenging to detect.
- Utilizes compressive sensing, a novel algorithm capable of reconstructing signals from incomplete observations, to efficiently map occluded obstacles with minimal data.
- Explores the ability of Wi-Fi signals to pass through and decay through objects, enabling the mapping of obstacles not directly visible to the robot.
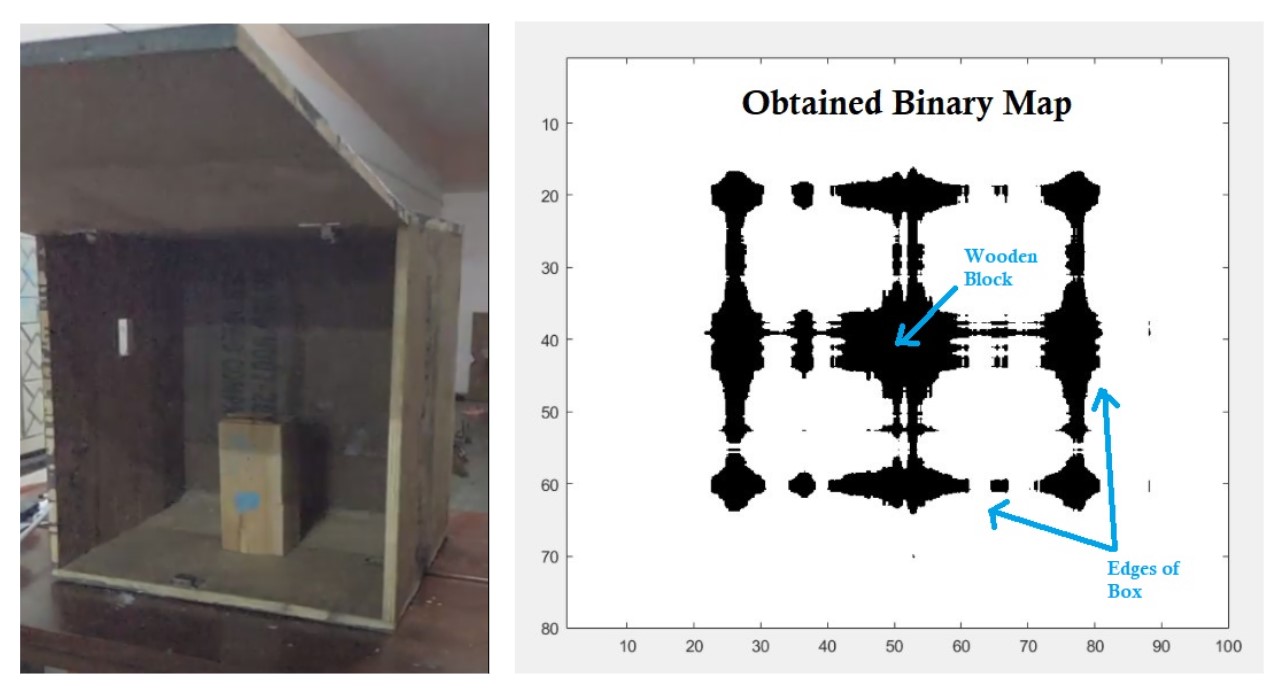
- Achieves accurate localization and shape determination of occluded objects within enclosed spaces.
- Designed for scenarios where a group of Unmanned Air Vehicles (UAVs) or robots needs to cooperatively build an aerial map within a limited timeframe.
- Addresses the practical constraints of delay-sensitive applications by minimizing the required measurements while still providing comprehensive obstacle mapping.
Our project, driven localization using Wi-Fi signals, pushes the boundaries of obstacle mapping in robotics, offering a solution that is both efficient and effective.