Aribot
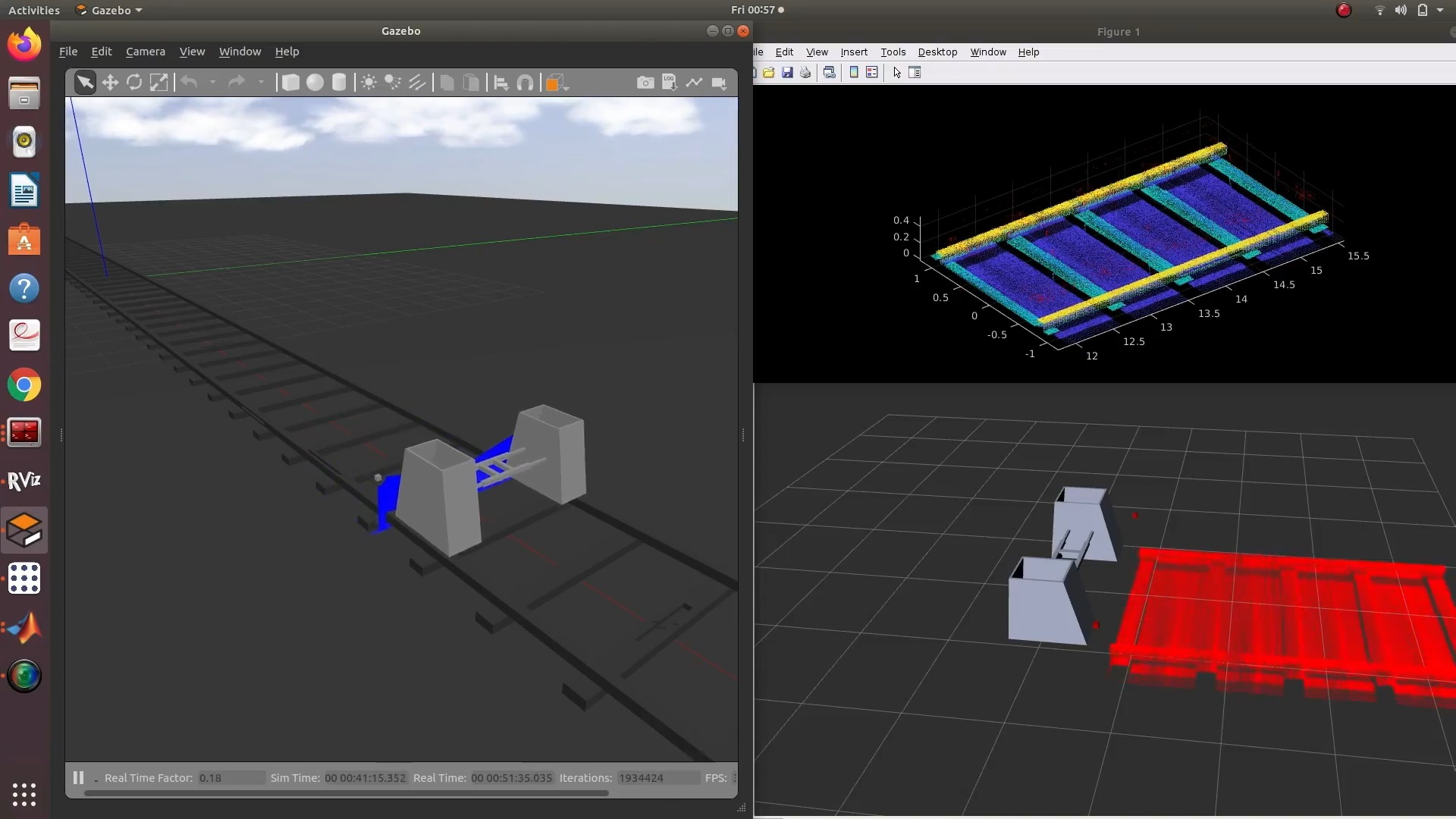
Built an autonomous railway track inspection robot using ROS, Gazebo, MATLAB, NGINX, and Tensorflow for efficient defect detection and real-time monitoring.
Built an autonomous railway track inspection robot using ROS, Gazebo, MATLAB, NGINX, and Tensorflow for efficient defect detection and real-time monitoring.
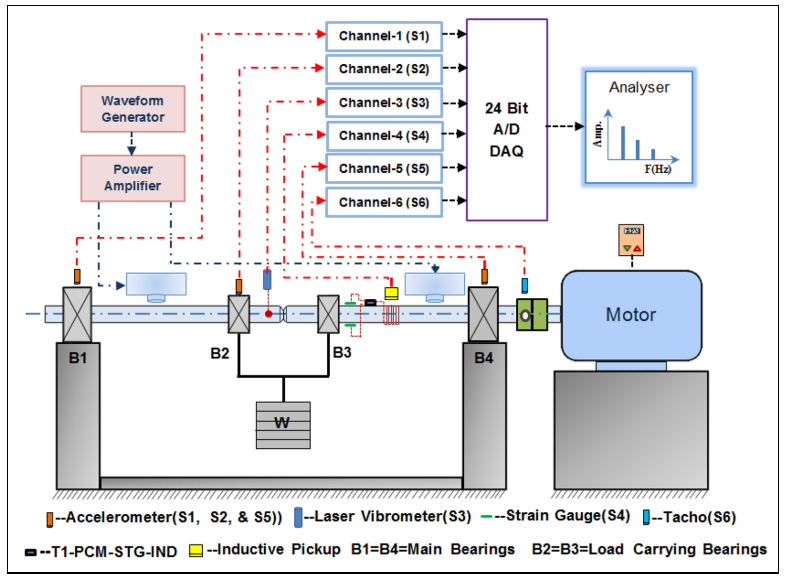
Continuous fault monitoring in large machinery using real-time vibration data and Machine Learning, advancing fault detection methodologies.
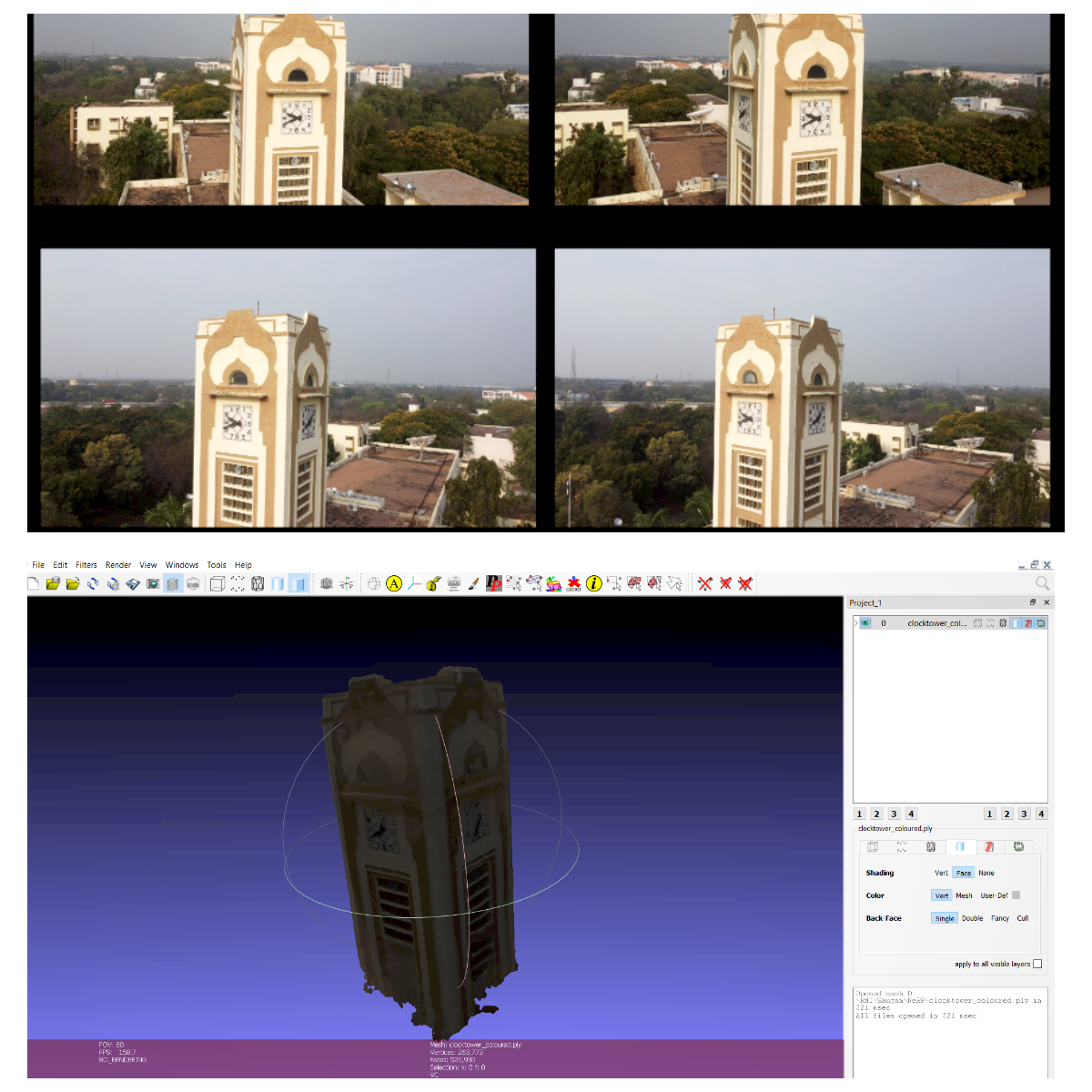
NeRF-based system for creating editable 3D models from minimal images using Tensorflow and Pytorch.
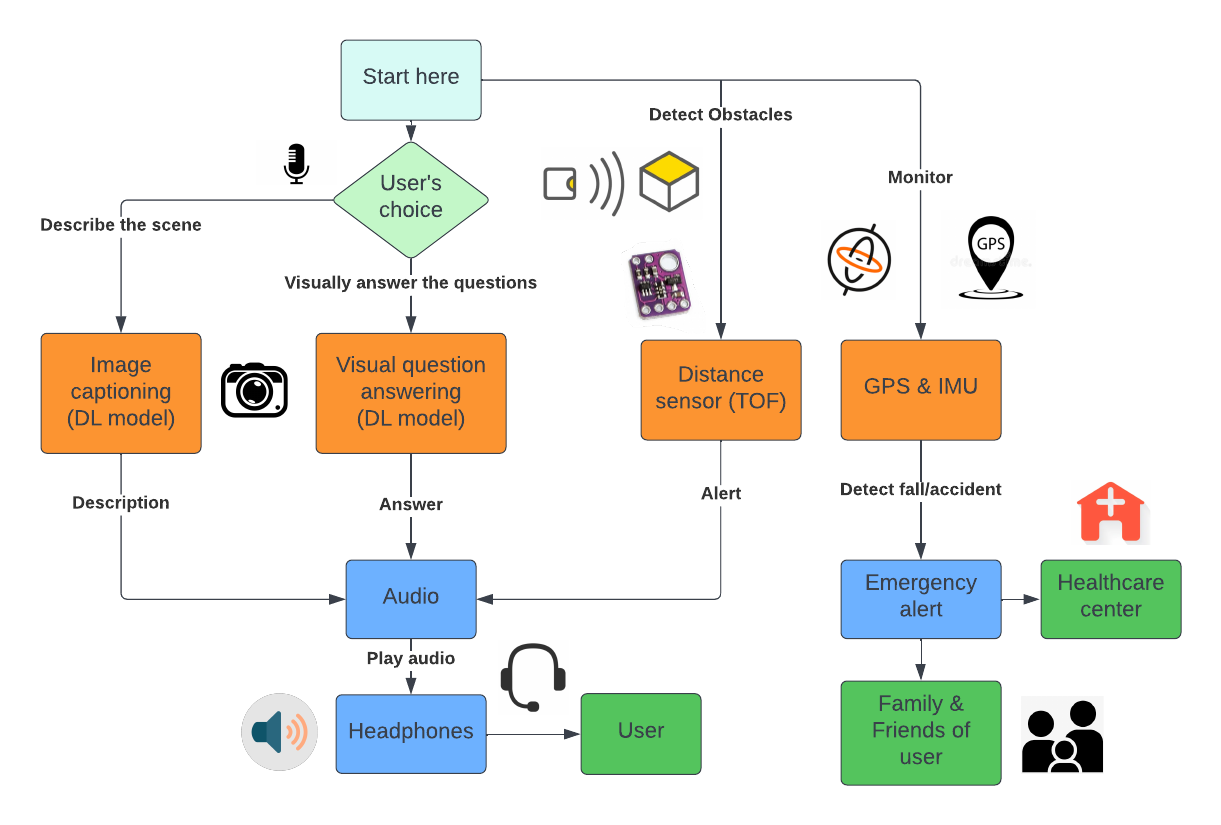
Affordable wearable for visually impaired: integrates deep learning, LIDAR, safety features, providing audio instructions for enhanced accessibility.
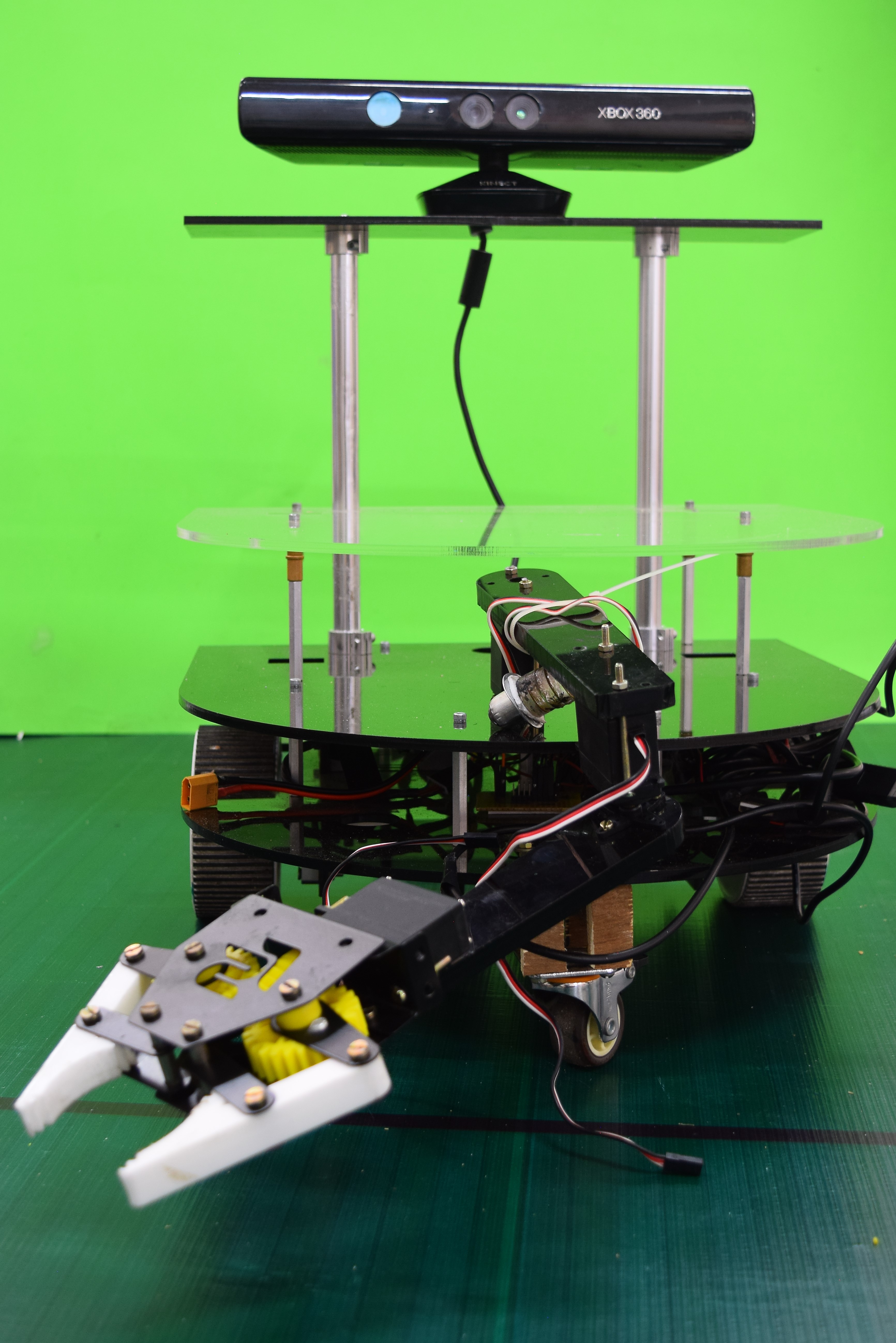
an advanced personal assistant with SLAM, Microsoft Kinect, ROS Gazebo, and Deep Learning for efficient navigation and intelligent object interaction.

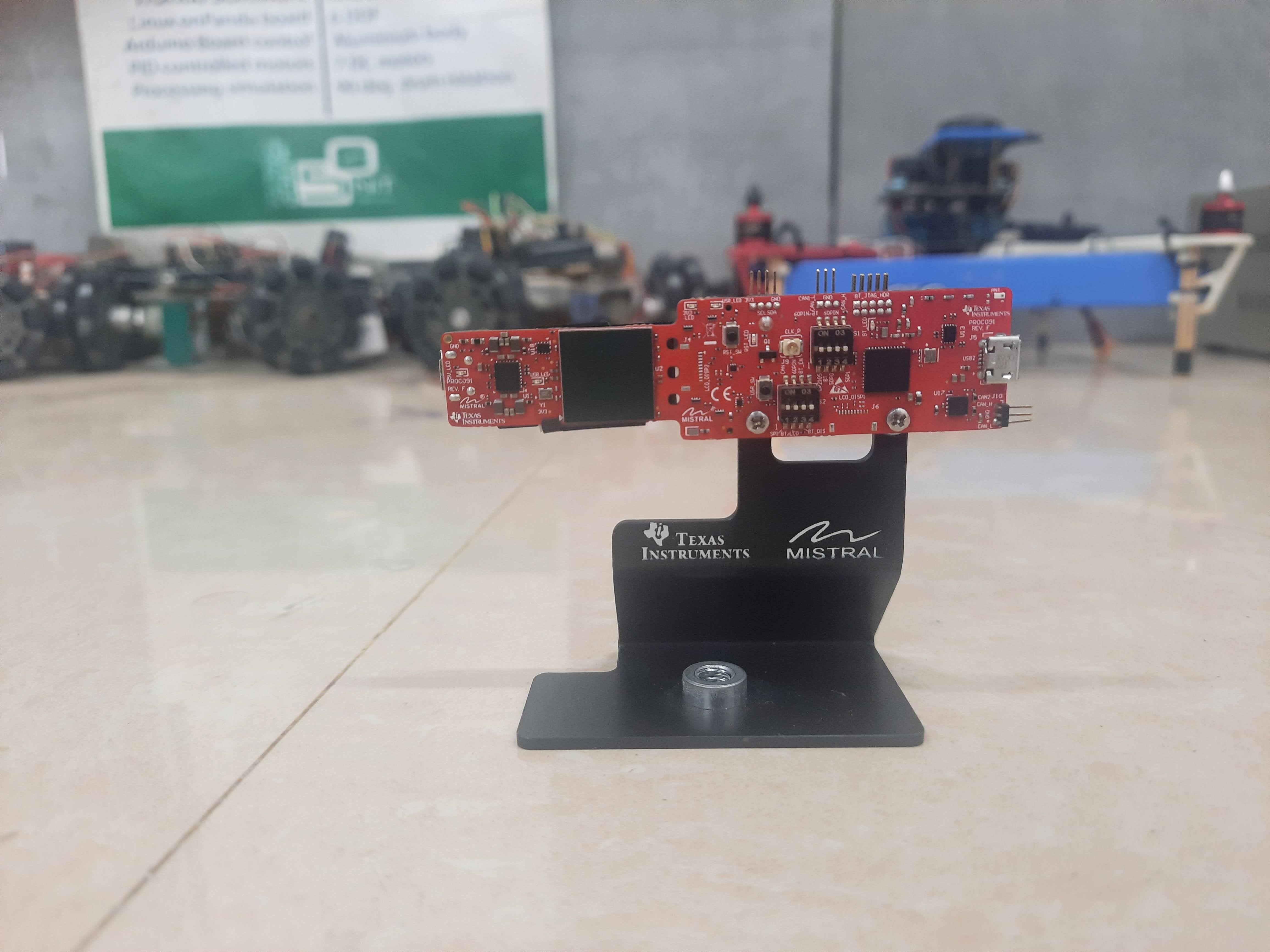
Open-souce platform for drone automation
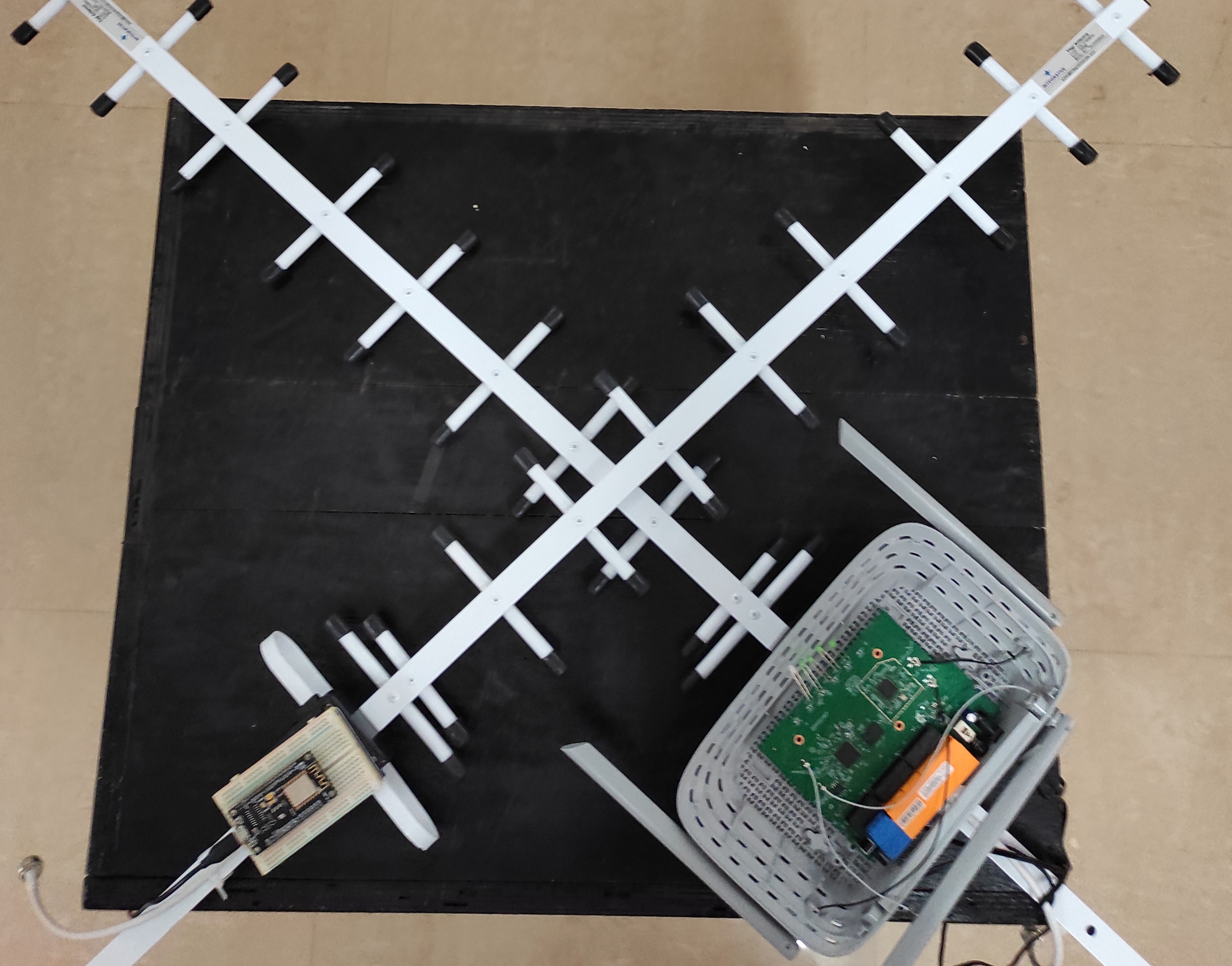
Wi-Fi-based obstacle mapping in robotic networks using compressive sensing for efficient localization in enclosed spaces.
FMCW radar-based wildlife monitoring using MATLAB and mm Waves for non-invasive, real-time tracking of vital signs with broad coverage in all weather conditions.

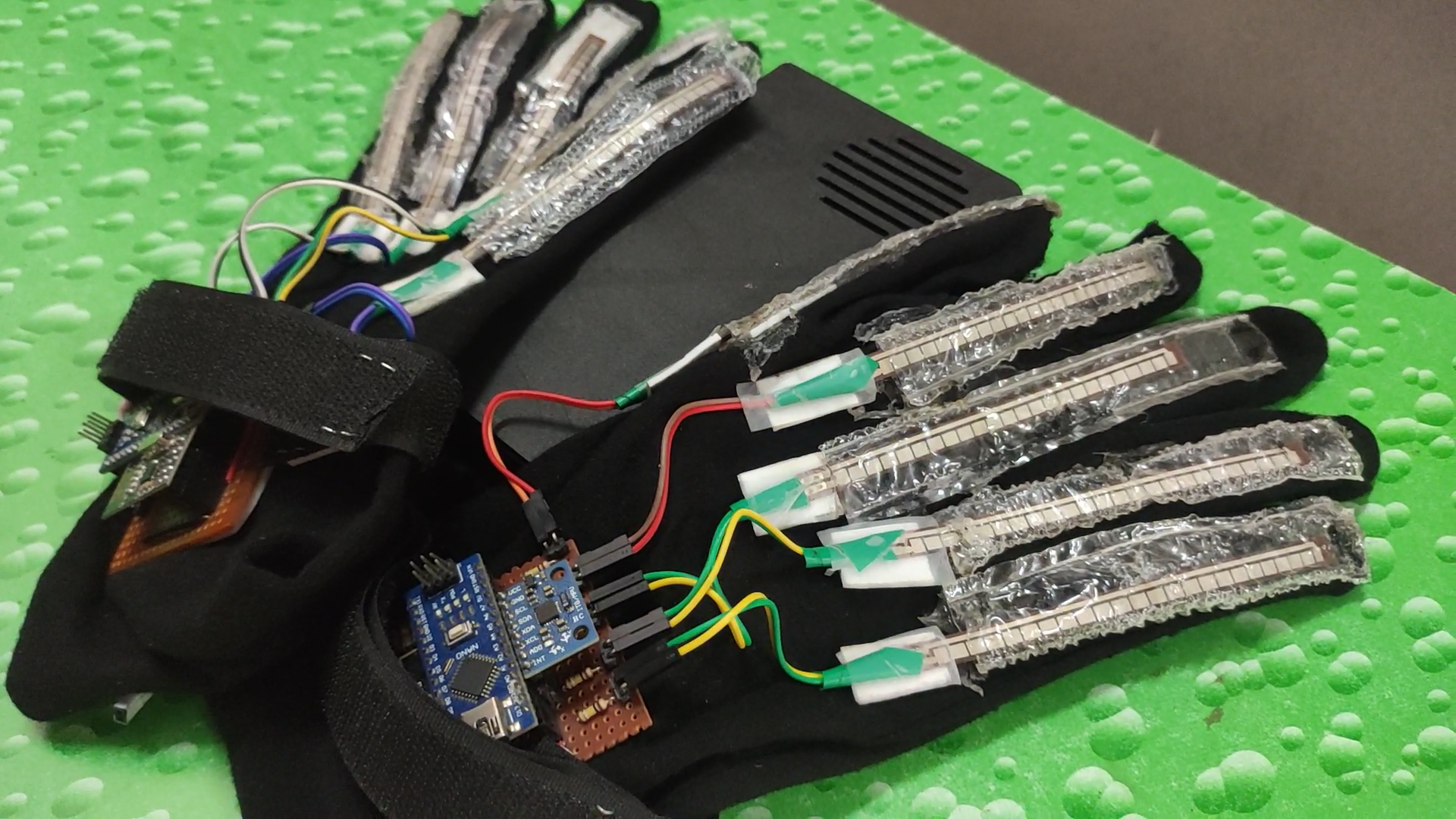
enhancing human hand capabilities for therapeutic recovery using Machine Learning and Control Systems.
A speech-to-sign language converter project for enhanced communication, utilizing Sony sPresence, nRF24L01+, Sensor Fusion, and Deep Learning.