
Objective
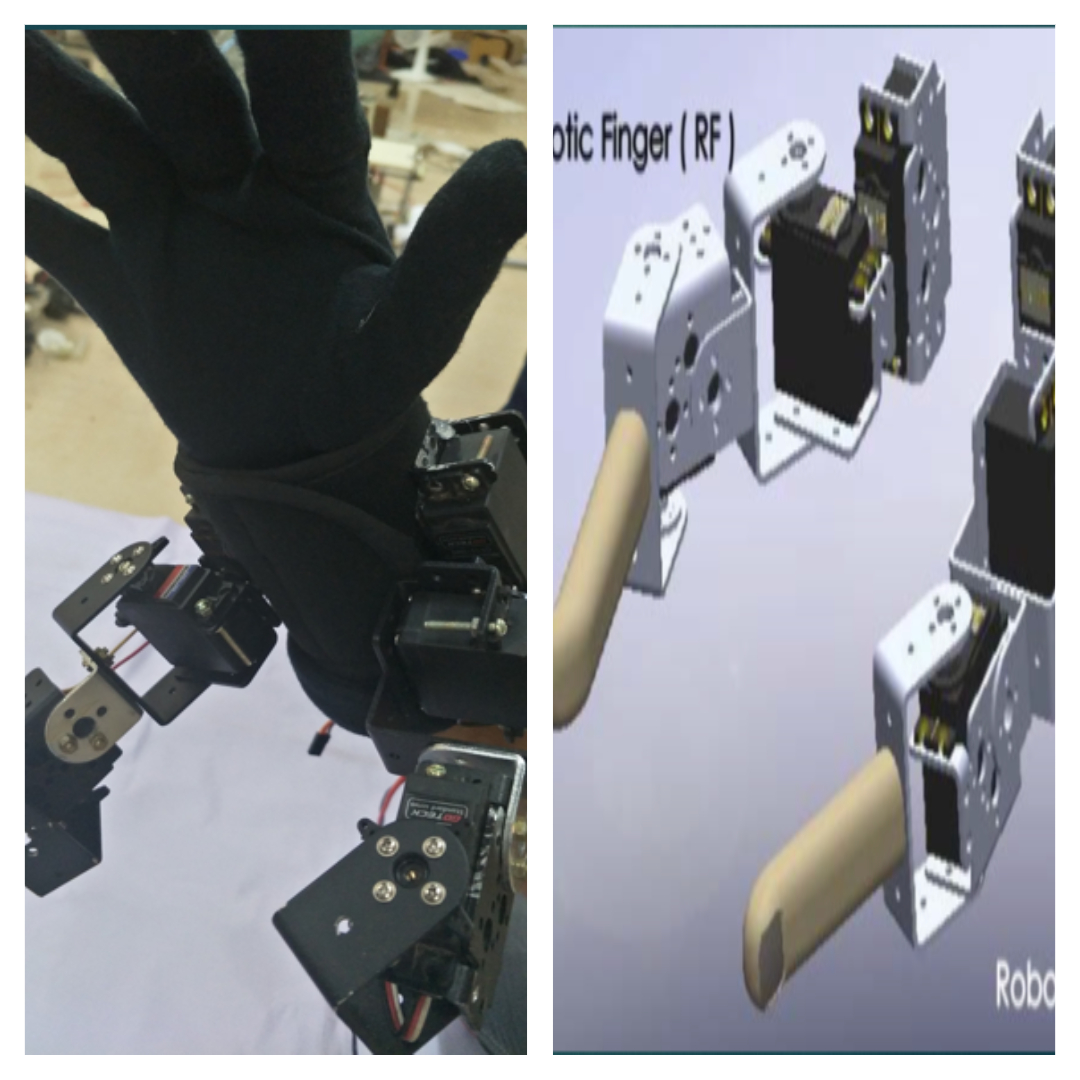
As a dedicated member of this transformative project, I contributed to the development of Supernumerary Robotic Fingers, a wearable robot designed to enhance the capabilities of the human hand for performing a range of prehensile, bimanual, and manipulation tasks.Technology Stack
- Machine Learning
- Control Systems
- Rehabilitative Robotics
- Dynamics
Key Features
The wearable robot serves as an active compensatory tool, particularly beneficial in the early stages of therapeutic recovery and rehabilitation. Key features include:- Enhanced Grasping Abilities: Designed to augment hand functions, aiding patients in recovering grasping abilities.
- Intuitive Control: Flex sensors on the patient’s fingers, integrated into a hand glove, and an Inertial Measurement Unit (IMU) enable intuitive control of the two robotic fingers.
- Therapeutic Recovery: Facilitates arm use even in the absence of fully recovered hand grasp function.
- Chronic Hemiparetic Support: Offers assistance for chronic hemiparetic patients to lead independent and productive lives.
- Rehabilitation Device: Intended as a tool to assist in bimanual tasks, such as grasping and manipulating objects.
This project, employing Machine Learning, Control Systems, Rehabilitative Robotics, and Dynamics, represents a significant stride in assistive technology, providing innovative solutions for individuals in therapeutic recovery seeking enhanced hand functionality.