Objective
As a member of this project, I contributed to the development of a solution addressing the critical need for efficient railway track maintenance and inspection.Tech Stack
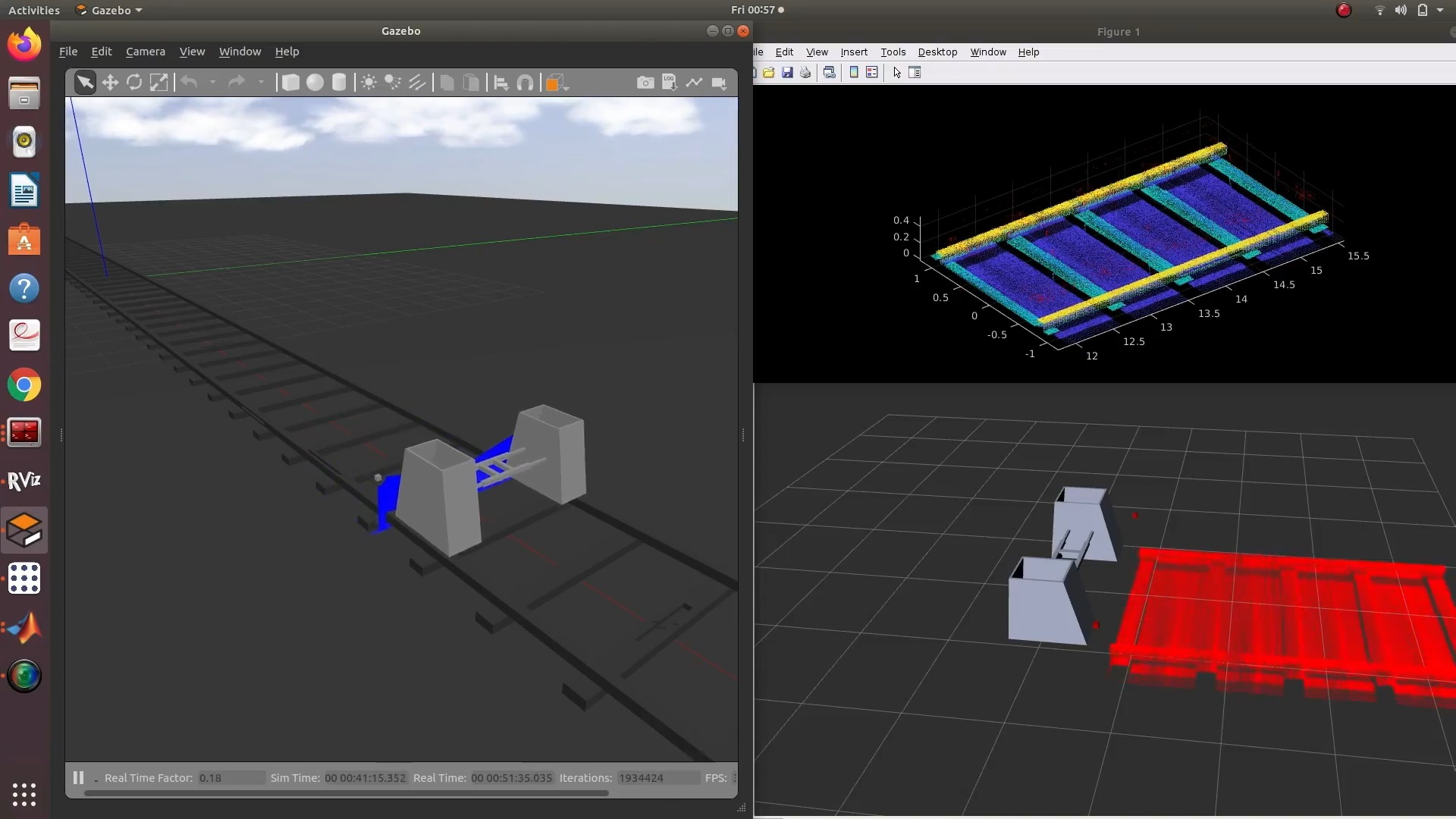
- Robot Operating System (ROS)
- Gazebo
- MATLAB
- NGINX
- Tensorflow
- Sensors: MPU 6050, GPS, Laser Scanner(LIDAR)

Key Features
Regular maintenance and inspection are vital for ensuring the safety and effectiveness of railway transportation. In India, where manual inspections are the norm, our project introduces an autonomous 4-wheeled robot designed for comprehensive railway track defect detection.- Capable of performing ultrasonic Nondestructive Test (NDT) for internal crack detection and 3D-laser profiling for surface cracks, gauge length, and ballast profile inspection.
- Equipped with a machine vision system (camera) for anomaly detection in fasters and sleepers.
- Autonomous inspection of tracks for defects in Ballast, Rails, Sleepers, and Fasteners, utilizing various testing methods.
- Integrated GPS, odometer, and IMU sensors for precise robot positioning and status monitoring.
- Inspection data, including ongoing capture and defect details, transmitted to a user-friendly web server.
- Web server accessible by inspection personnel for real-time monitoring and analysis, including live camera feed, laser track profiling, and other inspection data.
- Automated alerts to base stations for detected defects, providing spatio-temporal coordinates and defect details.
The use of ROS Gazebo, MATLAB, NGINX, and Tensorflow in our tech stack allowed us to develop a robust and efficient digital twin for autonomous railway track inspection, reducing human effort and enhancing accuracy.