Aribot
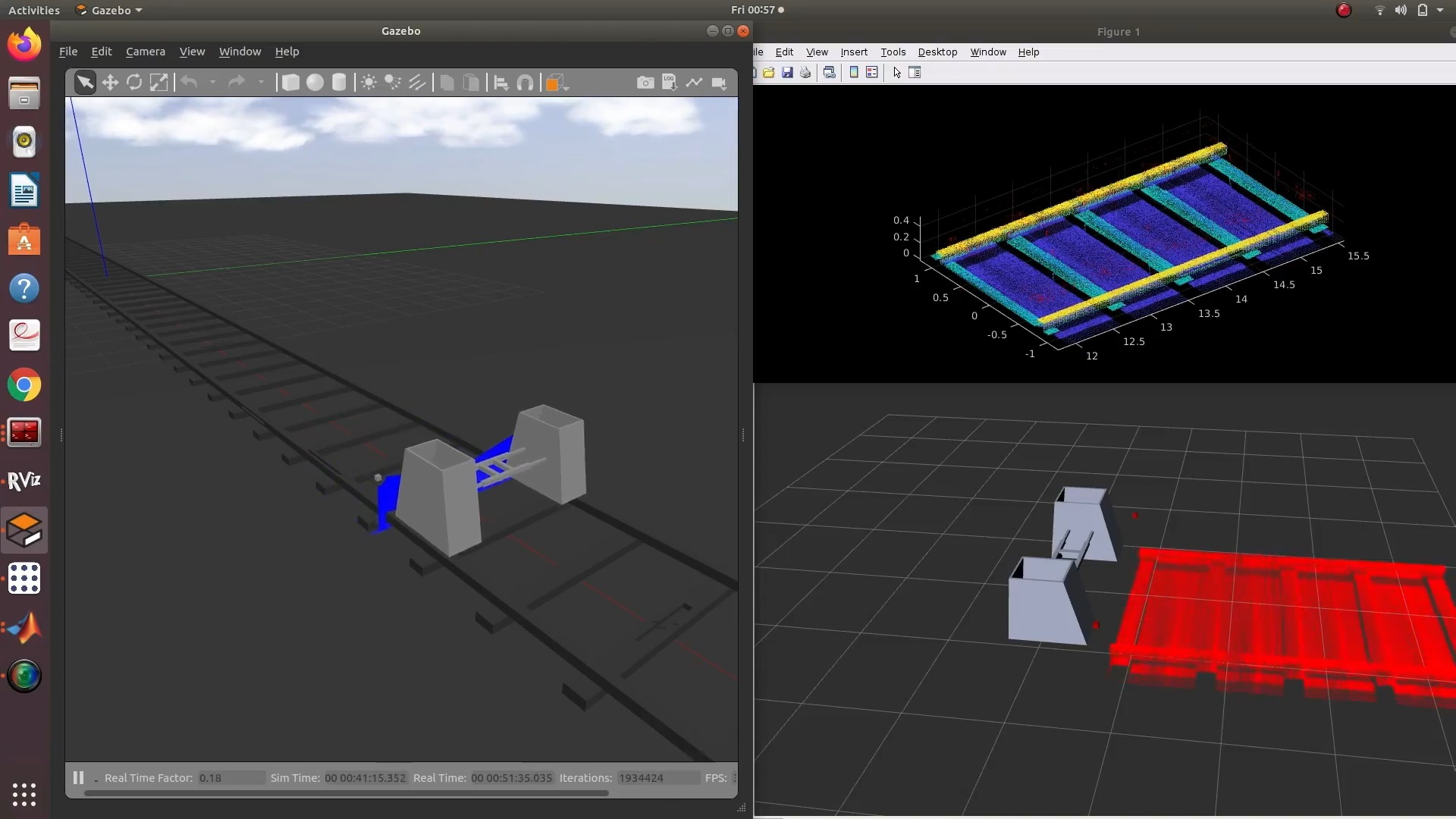
Built an autonomous railway track inspection robot using ROS, Gazebo, MATLAB, NGINX, and Tensorflow for efficient defect detection and real-time monitoring.
Built an autonomous railway track inspection robot using ROS, Gazebo, MATLAB, NGINX, and Tensorflow for efficient defect detection and real-time monitoring.
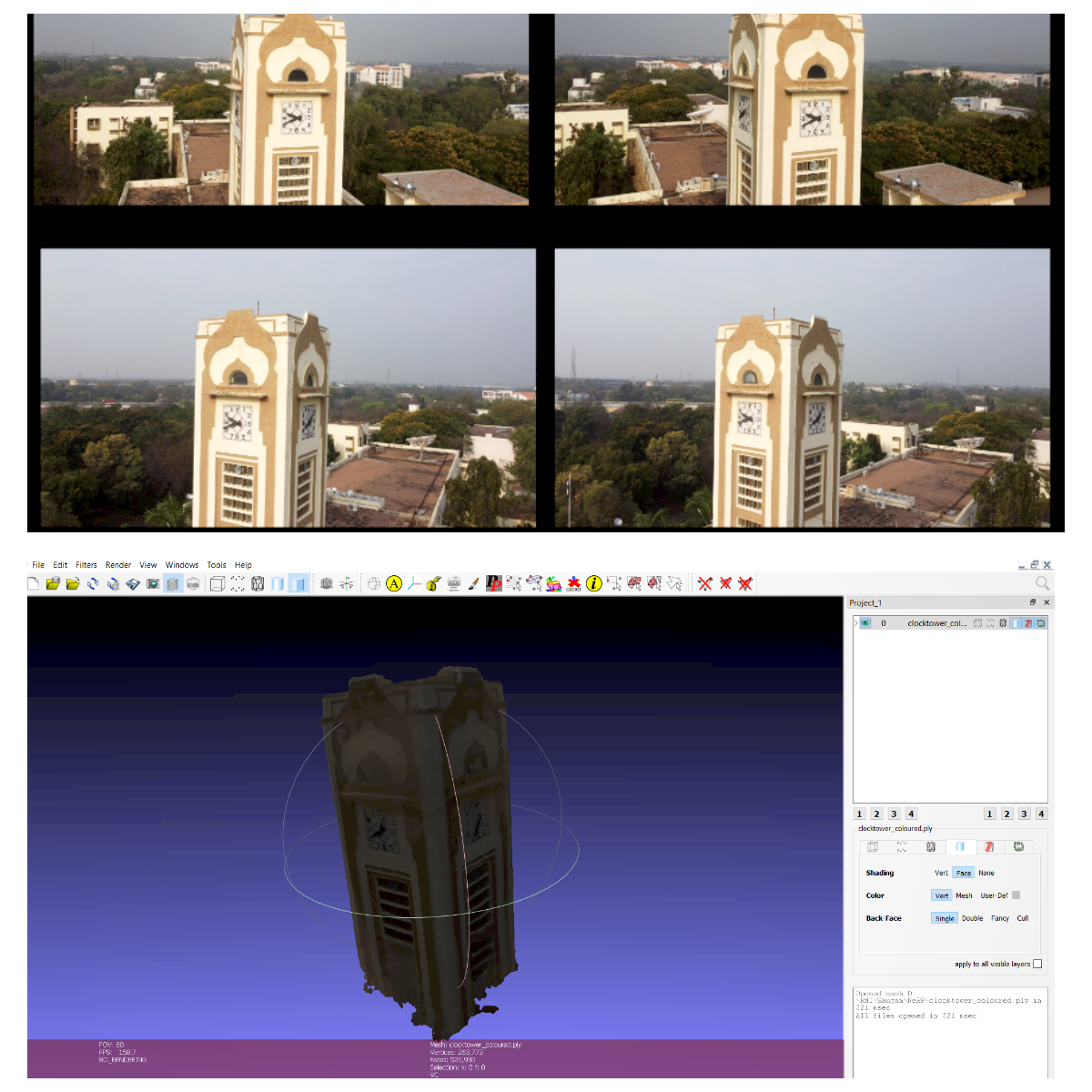
NeRF-based system for creating editable 3D models from minimal images using Tensorflow and Pytorch.
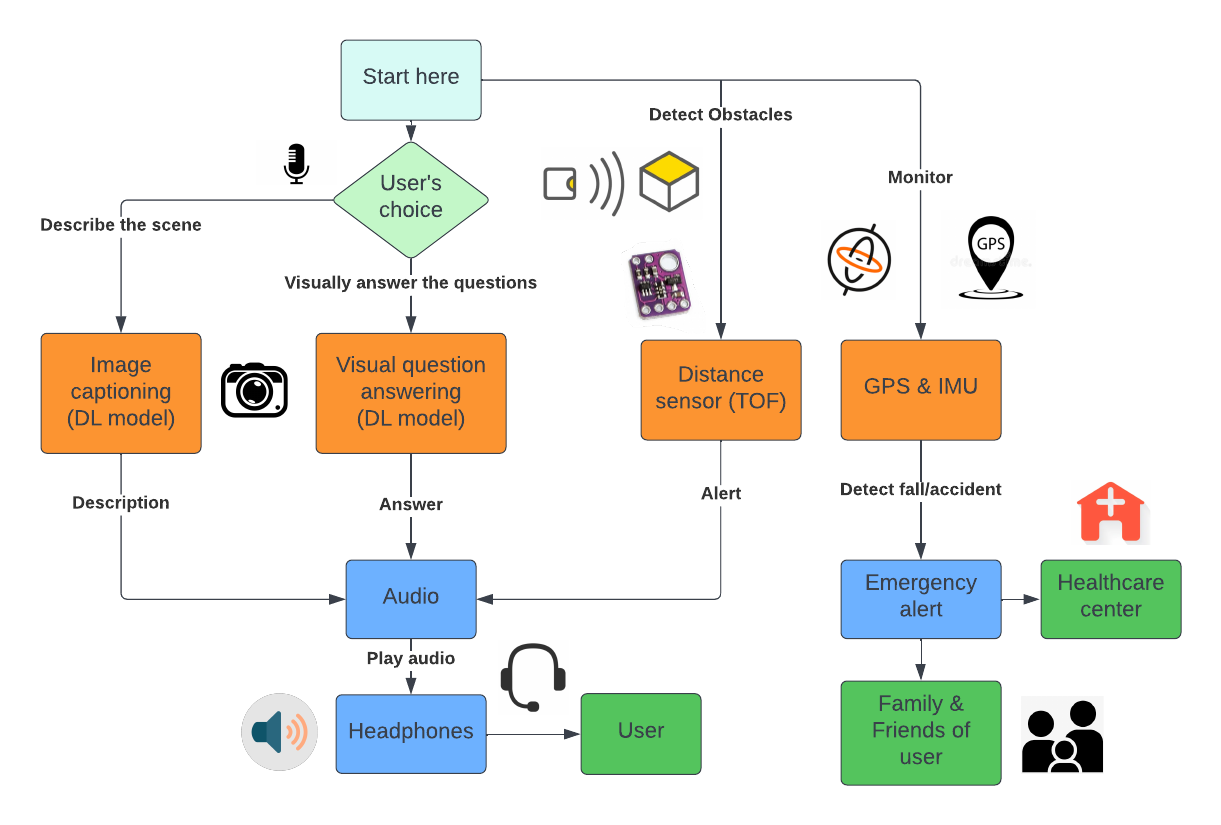
Affordable wearable for visually impaired: integrates deep learning, LIDAR, safety features, providing audio instructions for enhanced accessibility.
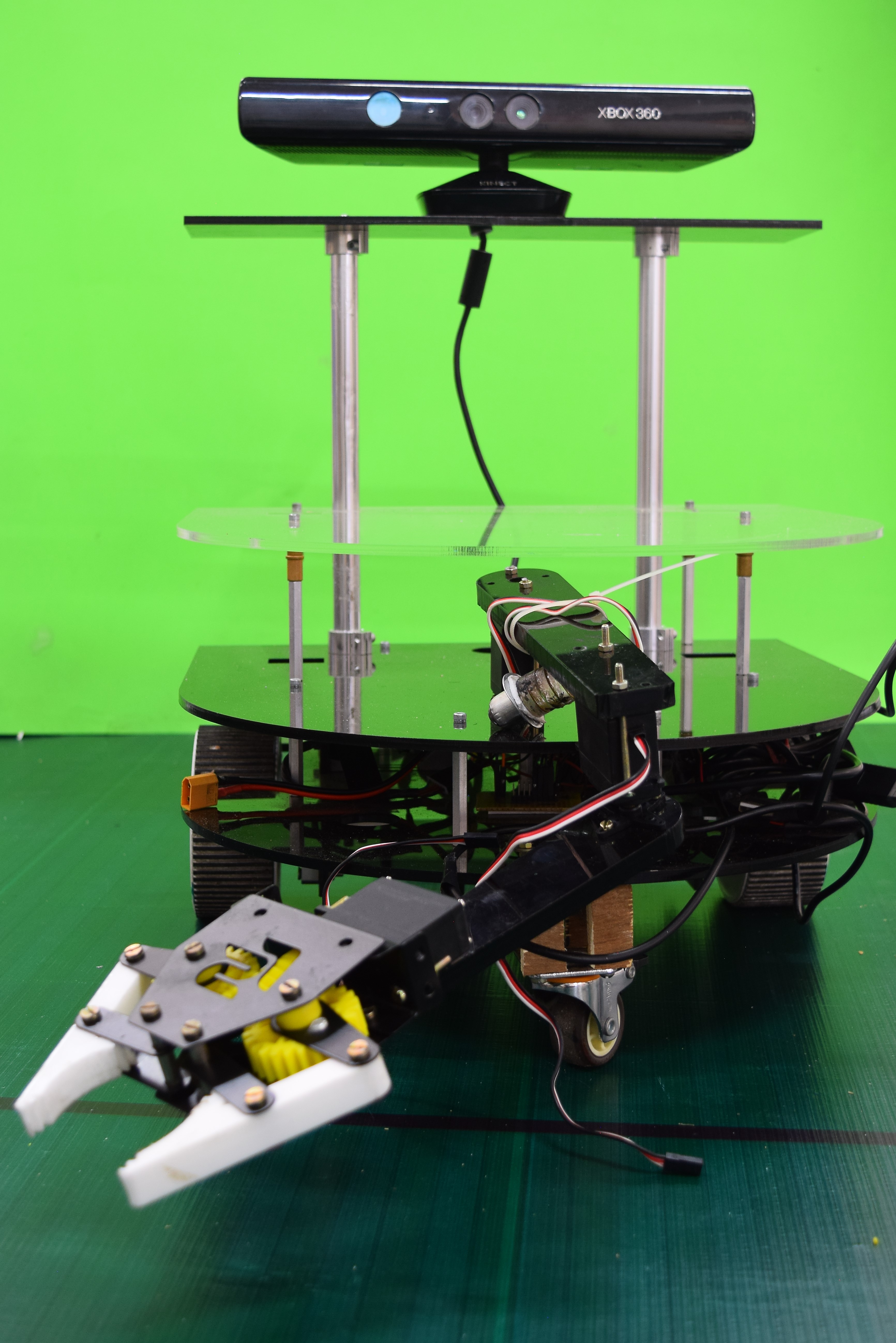
an advanced personal assistant with SLAM, Microsoft Kinect, ROS Gazebo, and Deep Learning for efficient navigation and intelligent object interaction.
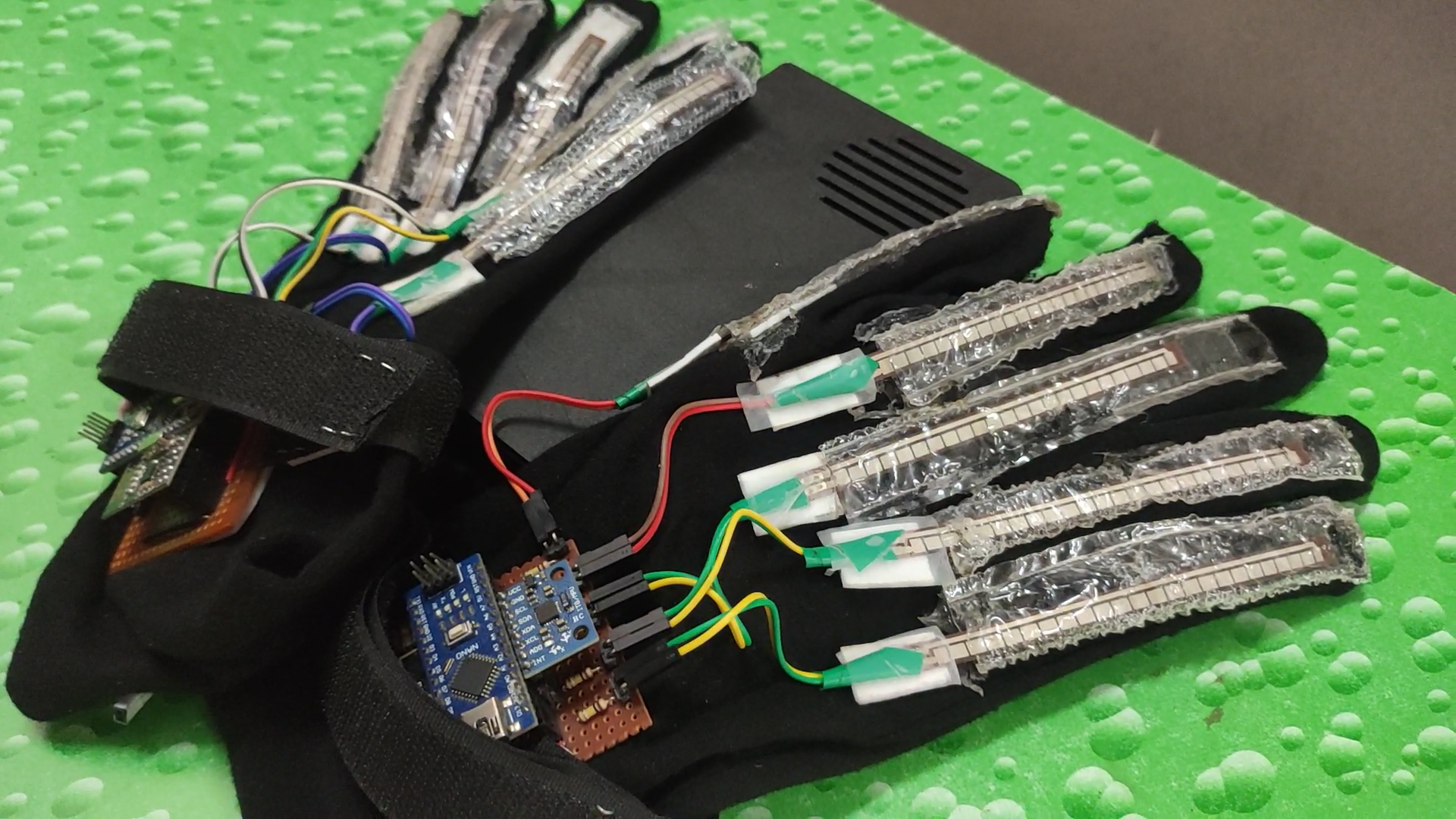
A speech-to-sign language converter project for enhanced communication, utilizing Sony sPresence, nRF24L01+, Sensor Fusion, and Deep Learning.